1 min to read
RRVM 编译器优化-software pipelining

rrvm-software pipelining
本 Post 更类似于对龙书软流水的摘抄和理解,Sysyc 在实现上采用的是硬流水的方法,本 Post 并无实现对应
必要性
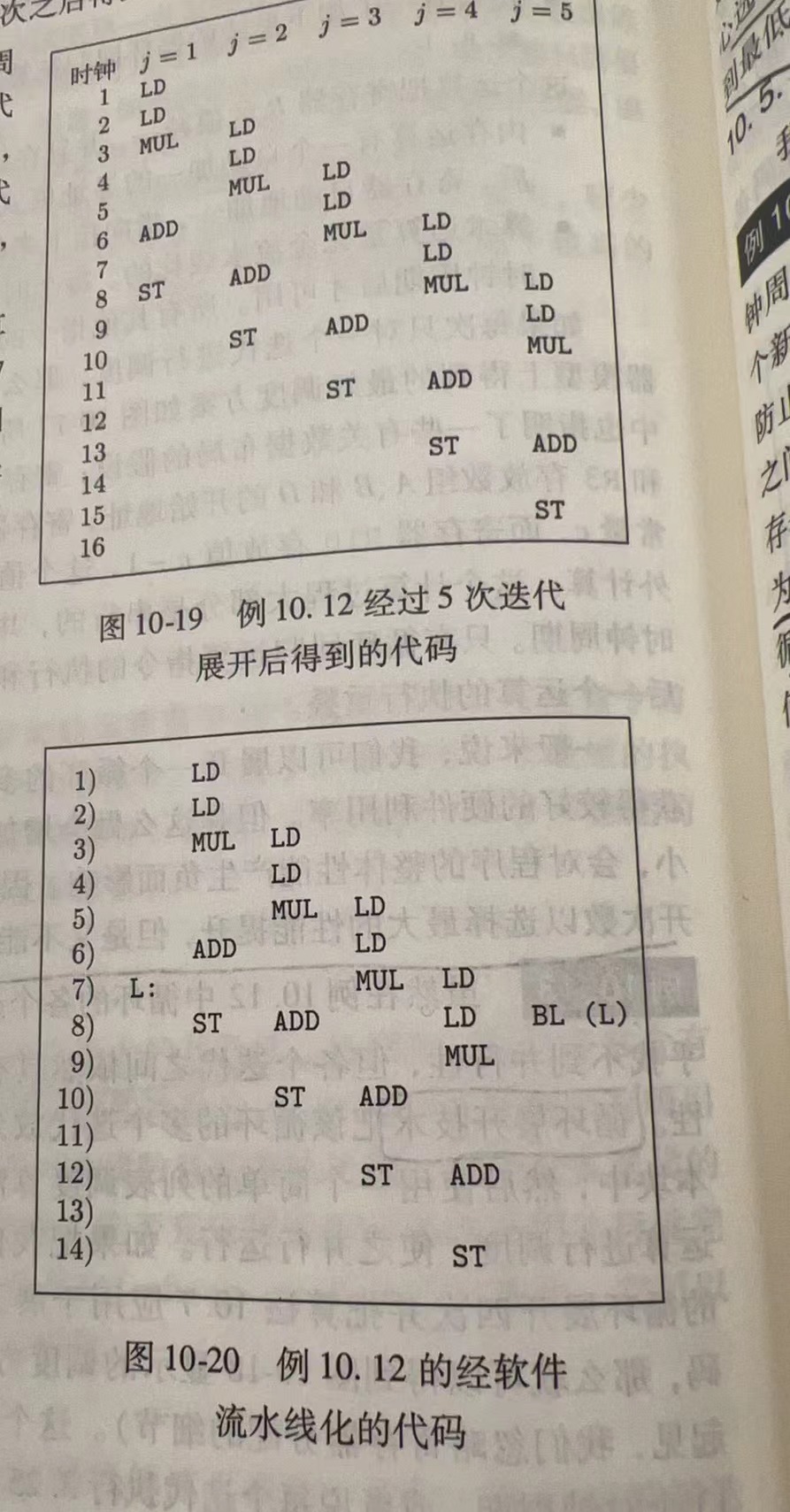
对于循环指令,在循环展开的基础上用软流水来减少硬件流水线中 load 之后立即 alu 等情况,从而提高性能
龙书算法
-
算法目的:在循环展开/一次考虑多个循环的时候,调整不同循环中的起始间隔和一个循环中的指令间的间隔,来使得总体执行的指令数最少
-
假设:机器可以在同一个时钟周期内发出一个load,一个store,一个算数运算,一个分支运算,而我们板子的情况将在后面讲到
算法
模数资源预约
说明: 启动间隔为T,相对调度方案为S,对于每个运算,指定了该运算相对于它所处迭代的开始时刻的执行时间 假设一个机器的资源表示为R=[r1,r2,r3,….],这里的r_i 表示的是比如说用i=1,2,3 对应的 r_i 来表述同一个时钟周期内可以执行的 load,store,alu,branch 数量,而显然,如果一个循环的单次迭代需要用到用到n_i个单元的第i种资源,比如说是会执行2条 load 指令,那么就对应用到2个单元的第一种资源。则一条流水线化的循环的平均启动间隔至少是max_i(n_i/r_i)个周期,如果 max_i(n_i/r_i)小于1就循环展开一下吧
接下来有如下结论: 假设已知了启动间隔为T(我们易于求出来T的下限),把n个迭代当成整体考虑,令 RT[t]=[0,0,…,1,0,0,..0,1],其中设 RT[t][i]==1,i为指令的类型
定义array RT_s,其中有 \(RT_s[i]=\sum_ RT[t]\) 则没有资源冲突的时候,RT_s[i]<=R for every i
数据依赖
假设第i次迭代中的运算 n_2 必须在第 i-alpha 次迭代中的运算 n_1 执行至少d个时钟周期后才可以执行,则给依赖边 n_1->n_2 加上标号 <alpha,d> 则 (alpha*T)+S(n2)-S(n1)>=d (T 为之前说的启动时间的间隔)
简化-无环数据依赖图
已知:机器的资源表示 R=[r1,r2,…,rn],数据依赖图G=(N,E),其中每个节点表示一个指令,每条边如上面的数据依赖所定义
- 求出理论上的最小启动间隔T_0 (比较简单,套用前面的公式)
- 对于T_0,对于按照优先级的拓扑顺序访问每个节点n,
我们先按照数据依赖的约束求出一个最小的 s 为该运算相对于它所处迭代的开始时刻的执行时间,然后先从s到s+T_0-1,判断是否满足模数资源预约中的不等式条件,如果可以就找到了解法,否则将T_0<=T_0+1 重复上述过程
有环数据依赖图调度
if 比如说有环:
(alpha1*T)+S(n_2)-S(n_1)>=d1
(alpha2*T)+S(n_1)-S(n_2)>=d2
then S(n_1)+d1-(alpha1*T)<=S(n_2)<=S(n_1)-d2+(alpha2*T)
考虑图的强连通分量,每个节点都可以从分量中其他节点到达,考虑对SCC中一个节点的调度:
存在一个从n_1到n_2的路径p,则有
\(S(n2)-S(n1)>=\sum_{e在p中}(d_e-(\alpha _e*T))\)
可以得出以下结论:
- 沿着任意一个环,各边的 $\alpha$ 求和是正数
- 环上延时的总和除以环上迭代距离的总和得到启动间隔的下界
- 进而得到,不等号右侧必然小于等于0,对于节点位置的最强约束来自于简单路径(不含环的路径)
和无环数据依赖图调度相比有如下变化:
- 对于数据依赖图中一个环c, \(T_0>=max(\sum_{e in c}d_e/\sum_{e in c}\alpha _e) ---------------①\) 所以要满足 ① 和无环数据依赖图的两个约束条件
- 一开始需要求出E’={e|e in E,alpha_e=0},和无环数据依赖图相比,调度单位为SCC(强连通分量)
所以算法整体 belike: ``` for (T=T_0,T_0+1,…..,所有 resources 都被调度完毕): E* = AllPairsLongestPath(G,T); // 以带优先级的拓扑顺序排序G中的SCC C for SCC C in G: for n in C: s0(n)=max_{e=p->n in E* with p scheduled}(S(p)+d_e); first=使得 s0(n) 取最小值的n; s0=s0(first); for s in range(s0,s0+T): if(SccScheduled(RT,T,C,first,s)) break; if C 不能在 RT 中调度 break
其中的SccScheduled belike: if not NodeScheduled: return false; for E’ 中各边的优先级的拓扑排序访问c中剩下的每一个n: S_l=max_{e=n’->n in E,n’ in c and n’ scheduled}(S(n’)+d_e-(alpha_eT)) S_u=min_{e=n’->n in E,n’ in c and n’ scheduled}(S(n’)-d_e+(alpha_eT)) for(s=S_l;s<=min(S_u,S_l+T-1);s++): if(NodeScheduled(RT’,T,n,s)) break; if n 不能在RT’中调度 return false; ```
模数变量扩展
如果一个变量的活跃范围在单个循环内,那么称该标量变量为可私有化的
变量扩展把一个可私有化标量变量转化为一个数组,让循环的第i次迭代读写第i个元素,可以消除数据依赖图中的环
if 一个寄存器生命周期为l时钟,启动间隔为T,则同一个时间点只有 $q=\left\lceil l/T\right\rceil$个变量是活跃的
算法改进:
- 先把和可私有化变量的相关的依赖关系删了
- 在1的基础上进行有环数据依赖图调度
- 对于每个可私有化变量v,计算q_v;令 Q=max(q_v);
- 生成经过软件流水线化过的循环中,分配给可私有化变量v的寄存器数目为 q_v’=(q_v if Q mod q_v==0 else Q) todo 考虑寄存器分配,e.g. caller save callee save 这步在寄存器分配之前先 precolored 这一步会把稳定时候的代码大小增加到原先q倍
和实际应用的差别
- 我们板子的情况:
- 单个周期内可以执行两条指令,并且有如下限制:
- 最多一次内存访存
- 最多一次跳转指令 (branch/jmp)
- 最多一次乘/除
- 最多两条加或者减
- 最多一条浮点数运算指令
- 两个指令中都不访问 flags(CSR)// 应该用不到,,
- 此外也需要考虑指令延时
- load 普遍用时3个时钟周期
- CSR 用时1个时钟周期
- MUL 用3个时钟周期
- DIV 是6~68时钟周期(Latency = 2 cycles + log2(dividend) - log2(divisor) + 1 cycle)
- 单个周期内可以执行两条指令,并且有如下限制:
- 实现位置
- 后端
- 思考:之前的instr-schedule 实际上是个非常朴素的实现,望通过software-pipelining 实现真正的instr-schedule(不是 instr-struggle(逃))
- 附加
- 通过上述的算法,我们可以知道循环起始间隔和单次循环中相邻指令的相差间隔,但是还有一个问题就是循环节在哪里。第一个循环的最后一条指令的上一个时钟周期前加上跳转的标签L,最后一个循环的第一条指令后的一个时钟周期处加上跳转指令 BL reg,L
- 具体一次考虑/展开多少个循环,书中没给明确的答案但是给的例子中都是4~5次,这个做一个超参吧
- 板子浮点数延时看 https://starfivetech.com/uploads/u74mc_core_complex_manual_21G1.pdf P267
Comments